
An exploration of the simplest Hyperbolic Paraboloidic ‘saddle’ form has lead to the development of a modular system that combines the principles of the hypar (Hyperbolic Paraboloid) and elastic potential energy.
A hyperbolic paraboloid is an infinite doubly ruled surface in three dimensions with hyperbolic and parabolic cross-sections. It can be parametrized using the following equations:
Mathematical: z = x2 – y2 or x = y z
Parametric: x(u,v)=u y(u,v)=v z(u,v)=uv
The physical manifestation of the above equations can be achieved by constructing a square and forcing the surface area to minimalise by introducing cross bracing that has shorter lengths than the square edges.


A particular square hypar defined by b = n * √2 (b=boundary, n=initial geometry or ‘cross bracing’) thus constricting the four points to the corners of a cube leads to interesting tessellations in three dimensions.

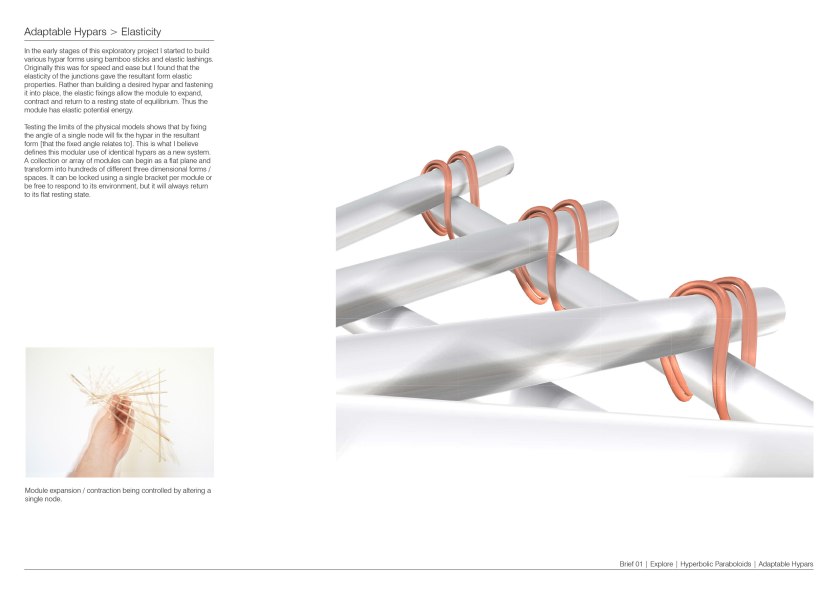
Using a simple elastic lashing system to construct a hypar module binds all intersections together whilst allowing rotational movement. The rotational movement at any given intersection is proportionally distributed to all others. This combined with the elasticity of the joints means that the module has elastic potential energy (spring-like properties) therefore an array of many modules can adopt the same elastic properties.


The system can be scaled, shaped, locked and adapted to suit programmatic requirements.

